ROS小车设置一系列导航点,使其沿着规划路径直线行驶
ROS系统内置了许多建图以及导航节点,在导航时我们通过拖拽箭头的方式实现目的地的设置,那么能不能通过程序写入一系列导航点,让小车依次沿着这些点前行呢?
ROS中使用action传递导航目的点,可以通过该博文看看action的基础知识。在这个博文里面已经实现了给定若干个坐标点,小车依次走过这些点。
本文在该基础上加上了走直线功能,举例说明。若想要小车依次走过三个坐标点a b c,按照上面的博客,a到b的小车路径是不可控的,b到c的同样如此,本文将实现小车导航到a点后,沿直线ab走到b,再沿直线bc走到c。
ROS中建图之后,运行默认的导航算法move_base,然后运行我给的导航节点发送节点。
你可以让小车走任意的折线,示例图如下:
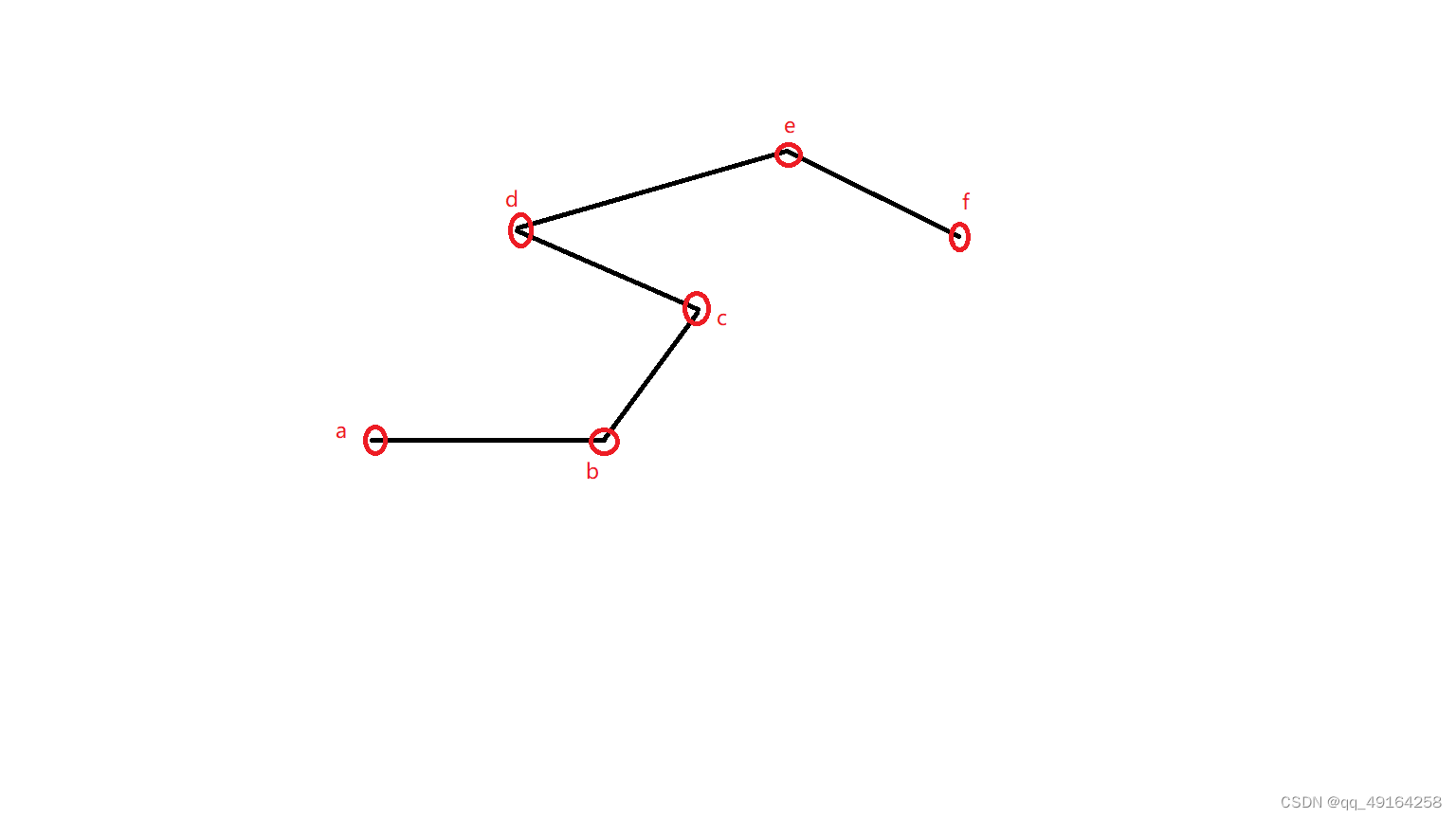 相应地在程序里面定义好abcdef的坐标点后,就可以实现小车走图上的路线,当然调用common_line函数部分也要修改为如下:
依次类推,不管有多少折线,只要给出折点坐标,都能让小车根据指定折线行走。
Turtlebot3实体车演示视频链接
相应地在程序里面定义好abcdef的坐标点后,就可以实现小车走图上的路线,当然调用common_line函数部分也要修改为如下:
依次类推,不管有多少折线,只要给出折点坐标,都能让小车根据指定折线行走。
Turtlebot3实体车演示视频链接
相应地在程序里面定义好abcdef的坐标点后,就可以实现小车走图上的路线,当然调用common_line函数部分也要修改为如下:
依次类推,不管有多少折线,只要给出折点坐标,都能让小车根据指定折线行走。
Turtlebot3实体车演示视频链接
上一篇:中国在线旅游交通行业研究报告
版权说明:
1.版权归本网站或原作者所有;
2.未经本网或原作者允许不得转载本文内容,否则将视为侵权;
3.转载或者引用本文内容请注明来源及原作者;
4.对于不遵守此声明或者其他违法使用本文内容者,本人依法保留追究权等。